LORAWAN, czyli ponad chmury CZĘŚĆ 2
Rok 2018 był dość pracowity dla zespołu Copernicus Project. W tym okresie byliśmy mocno zaangażowani w projekt 3-SAT organizowany przez uczniów 3 LO w Gdyni.
Głównym założeniem projektu było wyniesienie drona w głąb stratosfery, a następnie jego uwolnienie i autonomiczny powrót w miejsce startu.
Ta faza testów realizowana z lotniska Aeroklubu w Pile zakładała lot na wysokość około 700 metrów i pierwsze testy.
ZMIANA PLANÓW
Sobota, 16 czerwca 2018. Wyruszamy z Torunia dość wcześnie rano. Spotykamy się w Pile z pozostałą częścią ekipy. Artur dowozi hel z Poznania, gdyż dostaliśmy dość dobrą cenę (92 PLN netto/m^3). Mariusz dostarcza kolejną ulepszoną wersję trackera.
Początkowo zakładaliśmy, że po wyniesieniu drona, nasz balon poleci w dalszą część lotu już bez ładunku. No cóż eksperymentowanie polega na tym, że często plany zmieniają się w ostatniej chwili.
Tak było i w tym razem. Okazuje się, iż uczniowie przygotowali jeszcze drugą część projektu i potrzebują wynieść dodatkowe próbki.
CELE
Nasze cele dla tej misji były następujące:
– przygotować lepszy tracker LoRaWAN,
– śledzić balon bezpośrednio na stronie tracker.habhub.org przy współpracy TTN
– porównać możliwości zastosowania LoRAWAN z innymi powszechnie stosowanymi metodami transmisji.
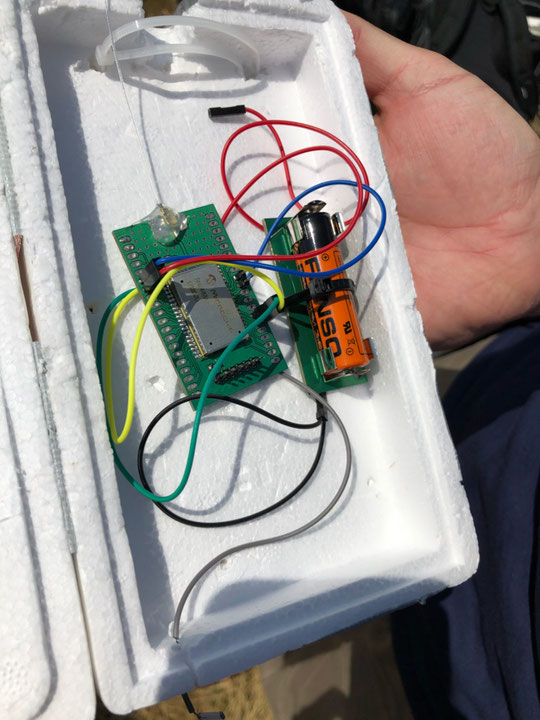
Nowy moduł śledzący był oparty na tych samych komponentach, co poprzednio, ale bez zewnętrznego mikrokontrolera – były tylko moduły RN2483 i GNSS. Mikrokontroler PIC umieszczony w module RN2483 ma wystarczającą ilość zasobów do wdrożenia niestandardowego oprogramowania opartego na wtyczce biblioteki LoRaWAN dla MCC wydanej przez Microchip.
Ponadto do komunikacji z modułem GNSS zastosowano dedykowany protokół, zamiast analizowania ramek NMEA wysyłanych w sposób ciągły. Takie podejście daje pełną kontrolę nad modułem GNSS w zakresie konfiguracji i odczytu danych. Wcześniej używaliśmy własną płytkę testową zaprojektowaną do testowania modułu RN2483. Moduł GNSS został przyklejony do drugiej strony tej płyty. Rodzaj zasilacza i styropianu pozostały takie same.
REALIZACJA
To nie był jedyny tracker wykorzystany w tej misji. Pojawiła się także radiosonda Vaisala RS41 z nadajnikami APRS (Automatic Position Reporting System) i RTTY.
Takie urządzenia są zwykle używane do śledzenia balonów na stronie tracker.habhub.org przez radioamatorów. W tym przypadku radiosonda została użyta do szybkiego i łatwego śledzenia i odzyskiwania ładunku przez zespół tracking & recovery wyposażony w ręczne odbiorniki radiowe.
Aplikacja TTNHABBridge została wykorzystana jako pomost programowy między siecią The Things Network a witryną śledzenia tracker.habhub.org.
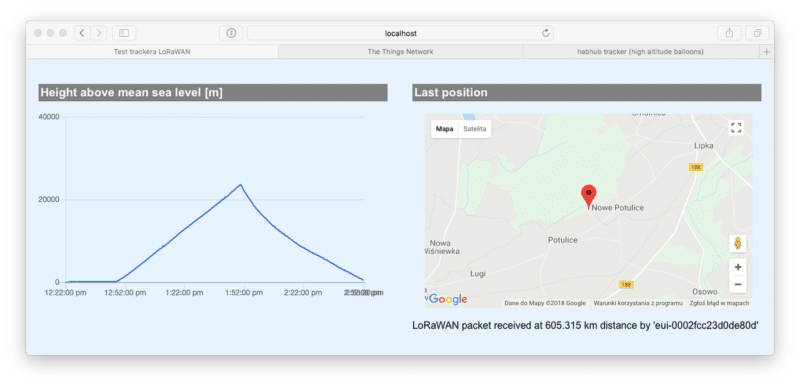
Dzięki Bertrik Sikken – autor tej aplikacji. Osobna aplikacja została przygotowana do rejestrowania danych, lokalizowania węzła i obliczania odległości do najodleglejszej bramy.
PODSUMOWANIE
Dron odłączył się na wysokości 750 metrów i kilka chwil później wylądował. Reszta ładunku poleciała w dalszą podróż. Nasz balon osiągnął wysokość 23700 metrów i wylądował 50 km od punktu startu.
Niestety urządzenia śledzące i próbki utknęły na wysokim drzewie. Zespół tracking & recovery dotarł do miejsca lądowania, ale nie był w stanie podjąć ładunku, ponieważ był bardzo wysoko i zaklinowany w gałęziach. Próbki odzyskano kilka dni później z pomocą strażaków.
WNIOSKI
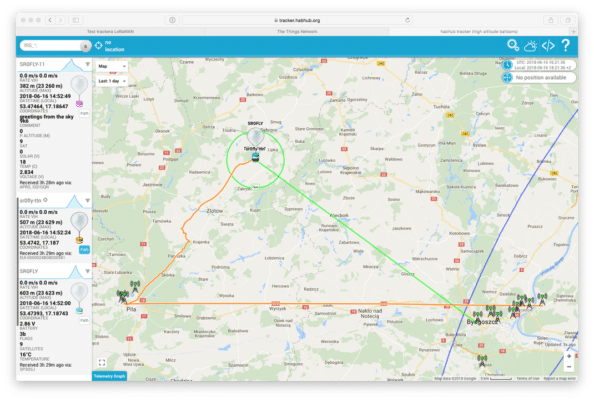
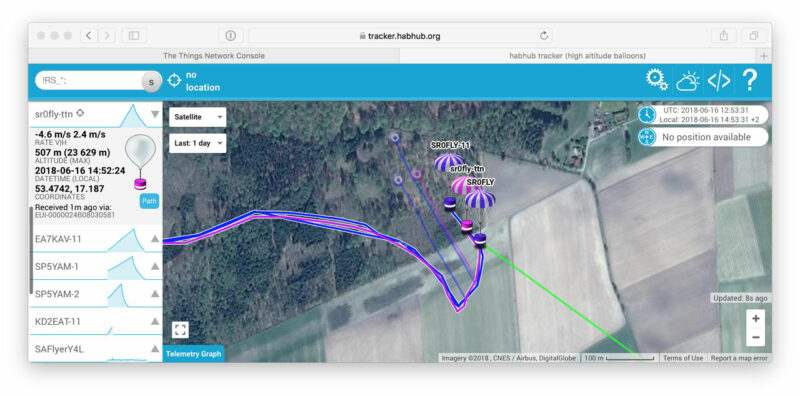
Bardzo interesujące było obserwowanie położenia balonu przy użyciu trzech niezależnych technologii jednocześnie! Na mapie można było zobaczyć trzy obiekty, ale wszystkie identyfikowały ten sam balon. Zasadniczo znaki wywoławcze służą do identyfikacji stacji lub operatorów.
W Polsce prefiks SR dotyczy stacji bezzałogowych (automatycznych). SR0FLY to amatorski radiowy znak zarejestrowany w celu identyfikacji urządzenia radiowego przymocowanego do balonu na dużej wysokości przez Copernicus Project.
Tak więc SR0FLY i SR0FLY-11 zostały użyte do identyfikacji odpowiednio nadajników RTTY (437,600 MHz) i APRS (432,500 MHz). Identyfikator urządzenia sr0fly-ttn przypisany do naszego urządzenia śledzącego LoRaWAN miał odnosić się do tego znaku wywoławczego.
W sumie 69 bramek TTN uczestniczyło w transmisji danych, ale 12 z nich miało nieprawidłowe współrzędne w swoich lokalnych plikach konfiguracyjnych. Pojedyncza ramka została odebrana przez maksymalnie 42 bramy. Najdalsza brama znajdowała się w Rydze, więc tym razem osiągnięto odległość 605 km. Dane zarejestrowane podczas tego lotu można znaleźć tutaj.
Ten lot udowodnił, że użycie LoRaWAN może być całkiem dobrą alternatywą dla tradycyjnych metod śledzenia. Zaletą jest to, że ta metoda nie wymaga zaangażowania licencjonowanych operatorów radiowych i odpowiedniego (zwykle drogiego) sprzętu radiowego.
Bramy działają autonomicznie i zwykle przez całą dobę. Dość duża i stale rozwijana infrastruktura jest w stanie zapewnić nieprzerwany transfer danych. Zasięg jest podobny do tradycyjnych metod przy porównywalnej mocy nadajnika. Wadą jest jednak zależność od samej sieci. Może to również stanowić problem przy odzyskiwaniu ładunku – szczególnie w obszarach bez możliwości zapewnienia dostępu do sieci.
credit: Mariusz Kubas, Stowarzyszenie Otwarta Siec Rzeczy